
ດ້ວຍການພັດທະນາຢ່າງວ່ອງໄວຂອງອຸດສາຫະກຳລົດຍົນໄຟຟ້າທົ່ວໂລກ, ການພັດທະນາພື້ນຖານໂຄງລ່າງການສາກໄຟທີ່ສະຫຼາດ ແລະ ໄດ້ມາດຕະຖານໄດ້ກາຍເປັນຄວາມຕ້ອງການອັນຮີບດ່ວນຂອງອຸດສາຫະກຳ. OCPP (Open Charge Point Protocol), ເປັນ “ພາສາທົ່ວໄປ” ທີ່ເຊື່ອມຕໍ່ສະຖານີສາກໄຟ EVດ້ວຍລະບົບການຄຸ້ມຄອງສູນກາງ, ກຳລັງເກີດຂື້ນເປັນເທັກໂນໂລຢີຫຼັກເພື່ອແກ້ໄຂບັນຫາການເຮັດວຽກຮ່ວມກັນຂອງອຸປະກອນ.

I. OCPP: ເປັນຫຍັງມັນຈຶ່ງຈຳເປັນສຳລັບການເຂົ້າສູ່ຕະຫຼາດເອີຣົບ?
OCPP ເປັນໂປໂຕຄອນການສື່ສານແບບເປີດ ແລະ ໄດ້ມາດຕະຖານ ເຊິ່ງຮັບປະກັນສະຖານີສາກໄຟລົດໄຟຟ້າ ຈາກຜູ້ຜະລິດທີ່ແຕກຕ່າງກັນສາມາດສື່ສານກັບລະບົບການຄຸ້ມຄອງ backend ທີ່ເຂົ້າກັນໄດ້ຢ່າງບໍ່ມີຂໍ້ບົກຜ່ອງ. ການລວມໂປໂຕຄອນ OCPP ຊ່ວຍໃຫ້ຜະລິດຕະພັນມີ "ອິນເຕີເຟດການສື່ສານມາດຕະຖານ", ສົ່ງມອບຄຸນຄ່າຫຼັກຜ່ານ:
ການທຳລາຍອຸປະສັກການເຮັດວຽກຮ່ວມກັນ: ຊ່ວຍໃຫ້ສະຖານີສາກໄຟສາມາດເຊື່ອມຕໍ່ກັບແພລດຟອມປະຕິບັດການຂອງພາກສ່ວນທີສາມໃດກໍໄດ້ທີ່ສອດຄ່ອງກັບມາດຕະຖານ OCPP, ເຊິ່ງຊ່ວຍເພີ່ມຄວາມສາມາດໃນການປັບຕົວຂອງຜະລິດຕະພັນ;
ການປະຕິບັດຕາມລະບຽບການ: ຕອບສະໜອງຄວາມຕ້ອງການດ້ານການເຮັດວຽກຮ່ວມກັນຂອງ EU ສຳລັບໂຄງສ້າງພື້ນຖານການສາກໄຟ, ເຊິ່ງເປັນເງື່ອນໄຂເບື້ອງຕົ້ນສຳລັບການເຂົ້າເຖິງຕະຫຼາດ;
ປົດລັອກຄຸນສົມບັດອັດສະລິຍະ: ຮອງຮັບການຄວບຄຸມໄລຍະໄກ, ການຮຽກເກັບເງິນ, ການຕິດຕາມສະຖານະ, ແລະ ການອັບເດດເຟີມແວ OTA, ຫຼຸດຜ່ອນຄວາມພະຍາຍາມໃນການພັດທະນາແອັບພລິເຄຊັນຊັ້ນເທິງລົງຢ່າງຫຼວງຫຼາຍ;
ການຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍໃນການເຊື່ອມໂຍງ: ນຳໃຊ້ໂປໂຕຄອນ stack ທີ່ຮັບຮອງເອົາຢ່າງກວ້າງຂວາງ, ຫຼີກລ່ຽງການພັດທະນາແບບກຳນົດເອງ ແລະ ຄ່າໃຊ້ຈ່າຍໃນການບຳລຸງຮັກສາໄລຍະຍາວທີ່ກ່ຽວຂ້ອງກັບໂປໂຕຄອນທີ່ເປັນເຈົ້າຂອງ.
II. MicroOcpp: ວິທີແກ້ໄຂນ້ຳໜັກເບົາທີ່ຖືກອອກແບບມາສຳລັບອຸປະກອນທີ່ຝັງຢູ່
ສຳລັບສະພາບແວດລ້ອມທີ່ຝັງຢູ່ດ້ວຍຊັບພະຍາກອນທີ່ຈຳກັດ, MicroOcpp ສົ່ງມອບການປະຕິບັດໂປໂຕຄອນ OCPP ທີ່ເໝາະສົມພ້ອມດ້ວຍຂໍ້ໄດ້ປຽບທີ່ສຳຄັນລວມທັງ:
ຮອຍຕີນຊັບພະຍາກອນຕ່ຳຫຼາຍ: ຂຽນດ້ວຍພາສາ C/C++ ແລະ ໄດ້ຮັບການປັບປຸງໃຫ້ດີທີ່ສຸດໂດຍສະເພາະສຳລັບໄມໂຄຣຄອນໂທຣເລີ ແລະ Linux ທີ່ຝັງຢູ່;
ການຮອງຮັບໂປໂຕຄອນທີ່ສົມບູນແບບ: ເຂົ້າກັນໄດ້ຢ່າງເຕັມທີ່ກັບ OCPP 1.6 ແລະຮອງຮັບການຍົກລະດັບເປັນ 2.0.1;
ການອອກແບບແບບໂມດູນ: ອະນຸຍາດໃຫ້ລວບລວມພຽງແຕ່ຄຸນສົມບັດທີ່ຕ້ອງການເພື່ອເພີ່ມປະສິດທິພາບການນໍາໃຊ້ຊັບພະຍາກອນຮາດແວ;
ເປັນມິດກັບນັກພັດທະນາ: ໃຫ້ອິນເຕີເຟດ API ທີ່ຊັດເຈນ ແລະ ຕົວຢ່າງຢ່າງກວ້າງຂວາງສຳລັບອຸປະສັກໃນການເຊື່ອມໂຍງຕໍ່າ.
III. ການປະຕິບັດການນຳໃຊ້: ການສ້າງລະບົບການສື່ສານ OCPP ຕັ້ງແຕ່ເລີ່ມຕົ້ນ
1. ການຕັ້ງຄ່າສະພາບແວດລ້ອມເຊີບເວີ
ນຳໃຊ້ເຊີບເວີ SteVe OCPP ຢ່າງວ່ອງໄວໂດຍໃຊ້ຄອນເທນເນີ Docker. ໃນຖານະເປັນລະບົບການຄຸ້ມຄອງສູນກາງແບບໂອເພນຊອສ, SteVe ໃຫ້ຄວາມສາມາດໃນການຄຸ້ມຄອງສະຖານີສາກໄຟທີ່ສົມບູນແບບ, ລວມທັງການບຳລຸງຮັກສາການສື່ສານ WebSocket, ການຕິດຕາມສະຖານະການສາກໄຟ, ແລະ ການອອກຄຳສັ່ງຄວບຄຸມໄລຍະໄກ.
2. ຂັ້ນຕອນການນຳໃຊ້ລູກຄ້າຫຼັກ
ໃນລະຫວ່າງການນຳໃຊ້ລູກຂ່າຍ MicroOcpp ໃນແພລດຟອມ MYD-YF13X, ພວກເຮົາໄດ້ນຳໃຊ້ສະພາບແວດລ້ອມລະບົບ Linux 6.6.78 ທີ່ສະໜອງໃຫ້. ກ່ອນອື່ນໝົດ, ລວບລວມຫ້ອງສະໝຸດແຫຼ່ງຂໍ້ມູນ MicroOcpp ເພື່ອສ້າງໄຟລ໌ທີ່ສາມາດປະຕິບັດໄດ້ທີ່ດີທີ່ສຸດຂອງ ARM. ຕໍ່ໄປ, ຕັ້ງຄ່າພິນ GPIO ເພື່ອຈຳລອງສະຖານະການເຊື່ອມຕໍ່ປືນສາກໄຟ: ໃຊ້ພອດ GPIO ສອງພອດເພື່ອສະແດງການກວດຫາສະຖານະສຳລັບແຕ່ລະອິນເຕີເຟດການສາກໄຟ.
3. ການສ້າງການສື່ສານລະຫວ່າງເຊີບເວີ ແລະ ລູກຄ້າ
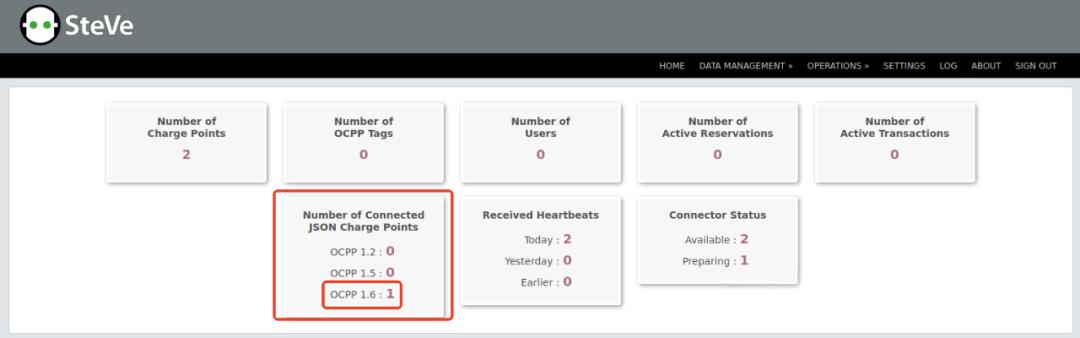
ຫຼັງຈາກການນຳໃຊ້, ລູກຄ້າໄດ້ສ້າງການເຊື່ອມຕໍ່ WebSocket ກັບເຊີບເວີ SteVe ສຳເລັດແລ້ວ:
ອິນເຕີເຟດການຄຸ້ມຄອງເຊີບເວີໄດ້ສະແດງໜ້າເວັບໃໝ່ສະຖານີສາກໄຟລົດໄຟຟ້າໃນເວລາຈິງ, ຢືນຢັນການເຊື່ອມຕໍ່ທີ່ຕິດພັນ ແລະ ການພົວພັນລະຫວ່າງໂປໂຕຄອນທີ່ເໝາະສົມ.
4. ການກວດສອບໜ້າທີ່ການລາຍງານສະຖານະ
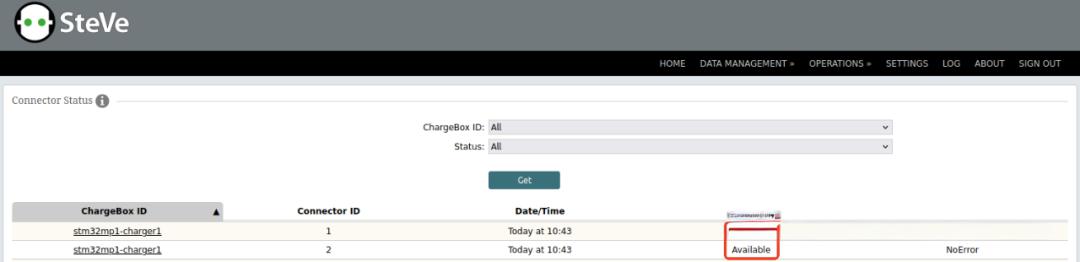
ໂດຍການຈັດການລະດັບ GPIO ເພື່ອຈຳລອງການໃສ່/ຖອດປືນສາກ, ພວກເຮົາສັງເກດເຫັນການປ່ຽນແປງສະຖານະພາບຂອງລູກຄ້າທີ່ລາຍງານໄປຫາເຊີບເວີໃນເວລາຈິງ.
ອິນເຕີເຟດເຊີບເວີຈະອັບເດດສະຖານະຂອງຕົວເຊື່ອມຕໍ່ພ້ອມກັນ, ໂດຍຢືນຢັນວ່າລະບົບຕ່ອງໂສ້ການສື່ສານທັງໝົດເຮັດວຽກຢ່າງຖືກຕ້ອງ.
ໃນຖານະທີ່ເປັນໂລກສະຖານີສາກໄຟອັດສະລິຍະຕະຫຼາດສືບຕໍ່ມີມາດຕະຖານ, ການສະໜັບສະໜູນໂປໂຕຄອນ OCPP ໄດ້ກາຍເປັນປັດໄຈສຳຄັນໃນການແຂ່ງຂັນຂອງຜະລິດຕະພັນ. ວິທີແກ້ໄຂ OCPP ທີ່ສົມບູນແບບທີ່ສະໜອງໃຫ້ໂດຍ Mir ໂດຍອີງໃສ່ແພລດຟອມ MYC-YF13X ບໍ່ພຽງແຕ່ຫຼຸດຜ່ອນຂອບເຂດການພັດທະນາຢ່າງຫຼວງຫຼາຍເທົ່ານັ້ນ ແຕ່ຍັງຮັບປະກັນການປະຕິບັດຕາມມາດຕະຖານຂອງຜະລິດຕະພັນ ແລະ ການປັບຕົວຂອງຕະຫຼາດ.
ເວລາໂພສ: ມັງກອນ-14-2026



